Although there are nowadays many Massive MIMO testbeds around the world, there are very few open datasets with channel measurement results. This will likely change over the next few years, spurred by the need for having common datasets when applying and evaluating machine learning methods in wireless communications.
The Networked Systems group at KU Leuven has recently made the results from one of their measurement campaigns openly available. It includes 36 user positions and two base station configurations: one 64-antenna co-located array and one distributed deployment with two 32-antenna arrays.
The following video showcases the measurement setup:
The tedious, time-consuming, and buggy nature of system-level simulations is exacerbated with massive MIMO. This post offers some relieve in the form of analytical expressions for downlink conjugate beamforming [1]. These expressions enable the testing and calibration of simulators—say to determine how many cells are needed to represent an infinitely large network with some desired accuracy. The trick that makes the analysis feasible is to let the shadowing grow strong, yet the ensuing expressions capture very well the behaviors with practical shadowings.
The setting is an infinitely large cellular network where each -antenna base station (BS) serves single-antenna users. The large-scale channel gains include pathloss with exponent and shadowing having log-scale standard deviation , with the gain between the th BS and the th user served by a BS of interest denoted by .With conjugate beamforming and receivers reliant on channel hardening, the signal-to-interference ratio (SIR) at such user is [2]
where is the gain from the serving BS and is the share of that BS’s power allocated to user . Two power allocations can be analyzed:
Uniform: .
SIR-equalizing [3]: , with the proportionality constant ensuring that . This makes . Moreover, as and grow large,
The analysis is conducted for , which makes it valid for arbitrary BS locations.
SIR
For notational compactness, let . Define as the solution to where is the lower incomplete gamma function. For , in particular, . Under a uniform power allocation, the CDF of is available in an explicit form involving the Gauss hypergeometric function (available in MATLAB and Mathematica):
where “” indicates asymptotic () equality, is such that the CDF is continuous, and
Alternatively, the CDF can be obtained by solving (e.g., with Mathematica) a single integral involving the Kummer function :
This latter solution can be modified for the SIR-equalizing power allocation as
Spectral Efficiency
The spectral efficiency of user is with CDF readily characterizable from the expressions given earlier. From , the sum spectral efficiency at the BS of interest can be found as Expressions for the averages and are further available in the form of single integrals.
With a uniform power allocation,
(1)
and . For the special case of , the Kummer function simplifies giving
(2)
With an equal-SIR power allocation
(3)
and .
Application to Relevant Networks
Let us now contrast the analytical expressions (computable instantaneously and exactly, and valid for arbitrary topologies, but asymptotic in the shadowing strength) with some Monte-Carlo simulations (lengthy, noisy, and bug-prone, but for precise shadowing strengths and topologies).
First, we simulate a 500-cell hexagonal lattice with , and . Figs. 1a-1b compare the simulations for – dB with the analysis. The behaviors with these typical outdoor values of are well represented by the analysis and, as it turns out, in rigidly homogeneous networks such as this one is where the gap is largest.
Figure 1: Analysis vs hexagonal network simulations with lognormal shadowing
For a more irregular deployment, let us next consider a network whose BSs are uniformly distributed. BSs (500 on average) are dropped around a central one of interest. For each network snapshot, users are then uniformly dropped until of them are served by the central BS. As before, , and . Figs. 2a-2b compare the simulations for dB with the analysis, and the agreement is now complete. The simulated average spectral efficiency with a uniform power allocation is b/s/Hz/user while (2) gives b/s/Hz/user.
Figure 2: Analysis vs Poisson network simulations with lognornmal shadowing.
The analysis presented in this post is not without limitations, chiefly the absence of noise and pilot contamination. However, as argued in [1], there is a broad operating range (– with very conservative premises) where these effects are rather minor, and the analysis is hence applicable.
Drones could shape the future of technology, especially if provided with reliable command and control (C&C) channels for safe and autonomous flying, and high-throughput links for multi-purpose live video streaming. Some months ago, Prabhu Chandhar’s guest post discussed the advantages of using massive MIMO to serve drone – or unmanned aerial vehicle (UAV) – users. More recently, our Paper 1 and Paper 2 have quantified such advantages under the realistic network conditions specified by the 3GPP. While demonstrating that massive MIMO is instrumental in enabling support for UAV users, our works also show that merely upgrading existing base stations (BS) with massive MIMO might not be enough to provide a reliable service at all UAV flying heights. Indeed, hardware solutions need to be complemented with signal processing enhancements through all communications phases, namely, 1) UAV cell selection and association, 2) downlink BS-to-UAV transmissions, and 3) uplink UAV-to-BS transmissions. These are outlined below.
1. UAV cell selection and association
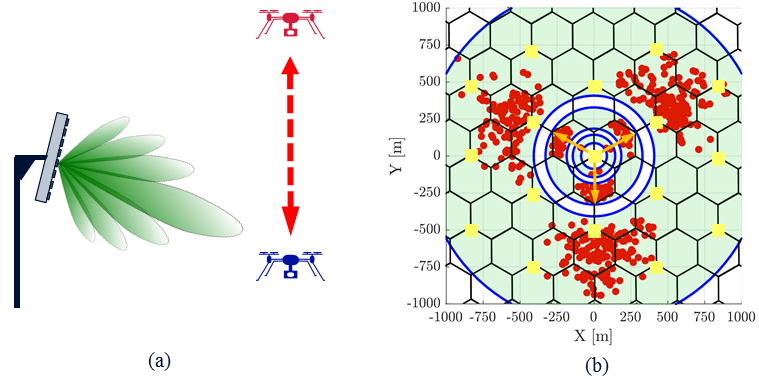
As depicted in Figure 1(a), most existing cellular BSs create a fixed beampattern towards the ground. Thanks to this, ground users tend to perceive a strong signal strength from nearby BSs, which they use for connecting to the network. Instead, aerial users such as the red drone in Figure 1(a) only receive weak sidelobe-generated signals from a nearby BS when flying above it. This results in a deployment planning issue as illustrated in Figure 1(b), where due to the radiation of a strong sidelobe, the tri-sector BSs located in the origin can be the preferred server for far-flung UAVs (red spots). Consequently, these UAVs might experience strong interference, since they perceive signals from a multiplicity of BSs with similar power.
Figure 1. (a) Illustration of a downtilted cellular BS and its beampattern: low (blue) UAV receives strong main lobe signals, whereas high (red) drone only receives weak sidelobe-generated signals. (b) 150-meter-high UAVs (red dots) associated with a three-cell BS site located at the origin and pointing at 30°, 150°, and 270°. The three BSs of each cellular site (orange squares) generate ground cells represented by hexagons.
On the other hand, thanks to their capability of beamforming the synchronization signals used for user association, massive MIMO systems ensure that aerial users generally connect to a nearby BS. This optimized association enhances the robustness of the mobility procedures, as well as the downlink and uplink data phases.
2. Downlink BS-to-UAV transmissions
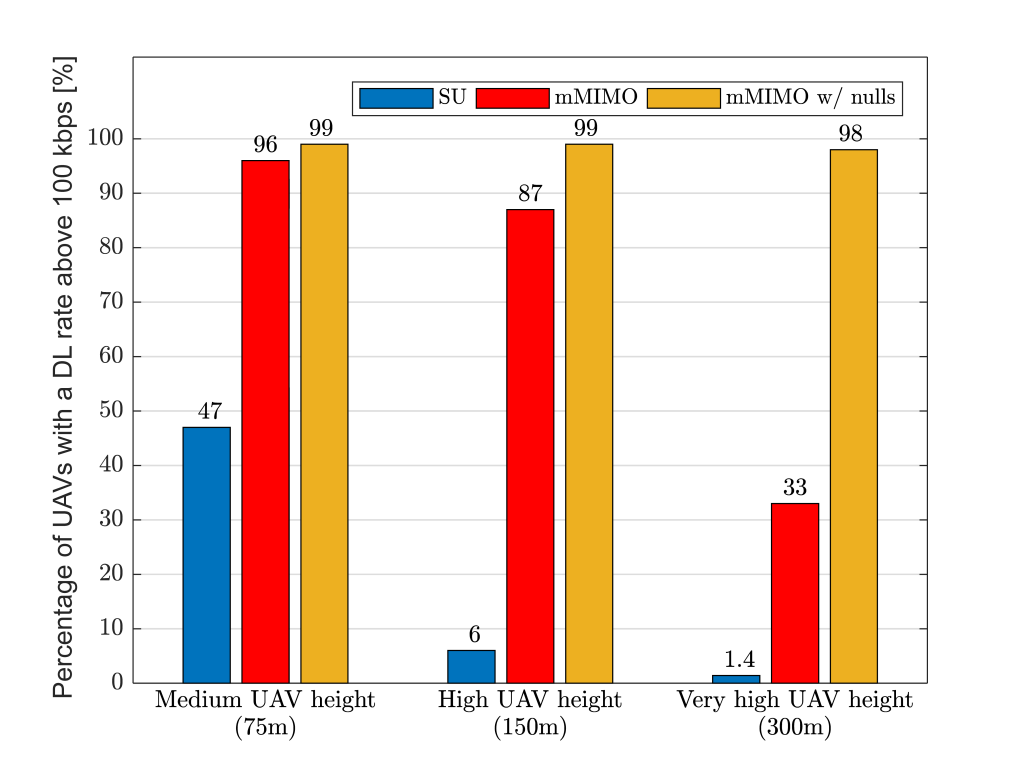
During the downlink data phase, UAV users are very sensitive to the strong inter-cell interference generated from a plurality of BSs, which are likely to be in line-of-sight. This may result in performance degradation, preventing UAVs from receiving critical C&C information, which has an approximate rate requirement of 60-100 kbps. Indeed, Figure 2 shows how conventional cellular networks (‘SU’) can only guarantee 100 kbps to a mere 6% of the UAVs flying at 150 meters. A conventional massive MIMO system (‘mMIMO’) enhances the data rates, albeit only 33% of the UAVs reach 100 kbps when they fly at 300 meters. This is due to a well-known effect: pilot contamination. Such an effect is particularly severe in scenarios with UAV users, since they can create strong uplink interference to many line-of-sight BSs simultaneously. In contrast, the pilot contamination decays much faster with distance for ground UEs.
In a nutshell, Figure 2 tells us that complementing conventional massive MIMO with explicit inter-cell interference suppression (‘mMIMO w/ nulls’) is essential when supporting high UAVs. In a ‘mMIMO w/ nulls’ system, BSs incorporate additional signal processing features that enable them to perform a twofold task. First, leveraging channel directionality, BSs can spatially separate non-orthogonal pilots transmitted by different UAVs. Second, by dedicating a certain number of spatial degrees of freedom to place radiation nulls, BSs can mitigate interference on the directions corresponding to users in other cells that are most vulnerable to the BS’s interference. Indeed, these additional capabilities dramatically increase the percentage of UAVs that meet the 100 kbps requirement when these are flying at 300 m, from 33% (‘mMIMO’) to a whopping 98% (‘mMIMO w/ nulls’).
Figure 2. Percentage of UAVs with a downlink C&C rate above 100 kbps for three representative UAV heights. ‘SU’ denotes a conventional cellular network with a single antenna port, ‘mMIMO’ represents a system with 8×8 dual-polarized antenna arrays and 128 antenna ports, and ‘mMIMO w/ nulls’ complements the latter with additional space-domain inter-cell interference suppression techniques.
3. Uplink UAV-to-BS transmissions
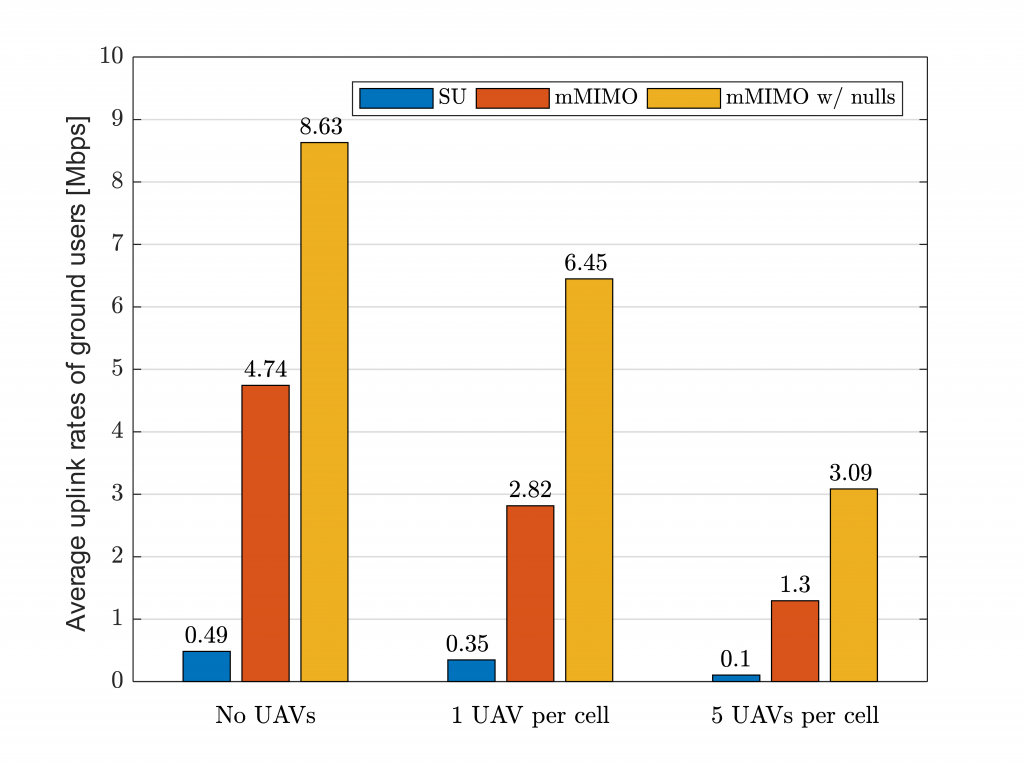
Unlike the downlink, where UAVs should be protected to prevent a significant performance degradation, it is the ground users who we should care about in the uplink. This is because line-of-sight UAVs can generate strong interference towards many BSs, therefore overwhelming the weaker signals transmitted by non-line-of-sight ground users. The consequences of such a phenomenon are illustrated in Figure 3, where the uplink rates of ground users plummet as the number of UAVs increases.
Again, ‘mMIMO w/nulls’ – incorporating additional space-domain inter-cell interference suppression capabilities – can solve the above issue and guarantee a better performance for legacy ground users.
Figure 3. Average uplink rates of ground users when the number of UAVs per cell grows. ‘SU’ denotes a conventional cellular network with a single antenna port, ‘mMIMO’ represents a system with 8×8 antenna dual-polarized antenna arrays and 128 antenna ports, and ‘mMIMO w/ nulls’ complements the latter with additional space-domain inter-cell interference suppression techniques.
Overall, the efforts towards realizing aerial wireless networks are just commencing, and massive MIMO will likely play a key role. In the exciting era of fly-and-connect, we must revisit our understanding of cellular networks and develop novel architectures and techniques, catering not only for roads and buildings, but also for the sky.
Three massive-MIMO-related highlights from IEEE ICC in Kansas City, MO, USA, this week:
J. H. Thompson from Qualcomm gave a keynote on 5G, relaying several important insights. He stressed the fundamental role of Massive MIMO, utilizing reciprocity (which in turn, of course, implies TDD). This is a message we have been preaching for years now, and it is reassuring to hear a main industry leader echo it at such an important event. He pointed to distributed Massive MIMO (that we know of as “cell-free massive MIMO“) as a forthcoming technology, not only because of the macro-diversity but also because of the improved channel rank it offers to multiple-antenna terminals. This new technology may enable AR/VR/XR, wireless connectivity in factories and much more… where conventional massive MIMO might not be sufficient.
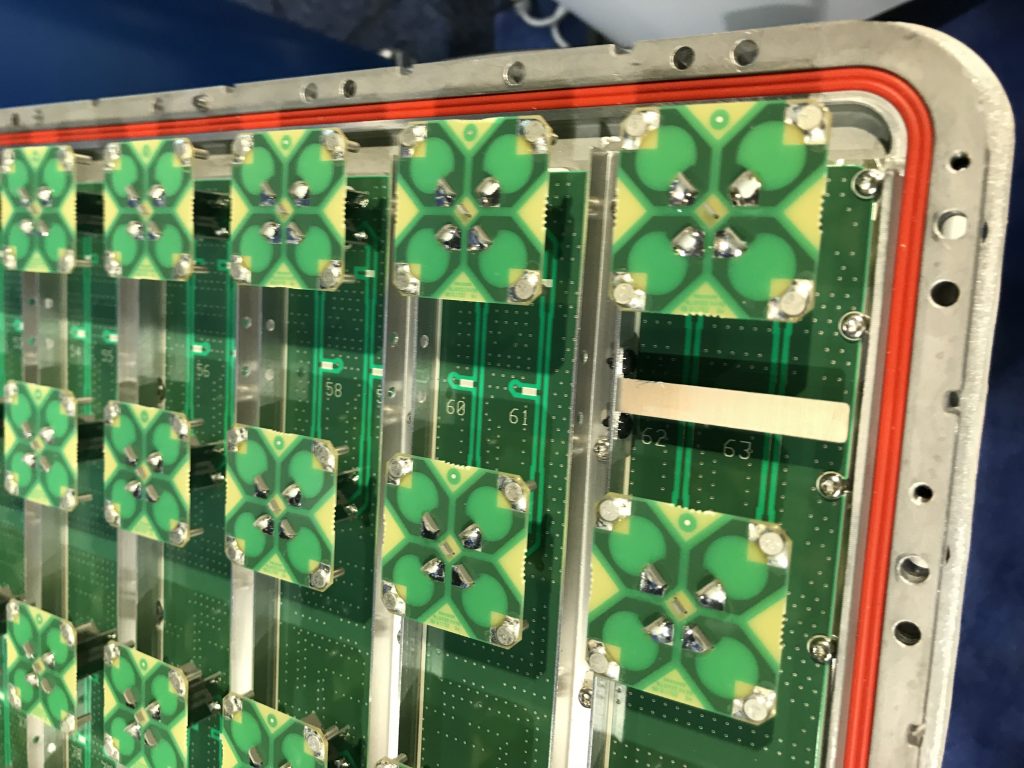
In the exhibition hall Nokia showcased a 64×2=128 Massive MIMO array, with fully digital transceiver chains, small dual-polarized path antennas, operating at 2.5 GHz and utilizing reciprocity – though it wasn’t clear exactly what algorithmic technology that went inside. (See photographs below.) Sprint already has deployed this product commercially, if I understood well, with an LTE TDD protocol. Ericsson had a similar product, but it was not opened, so difficult to tell exactly what the actual array looked like. The Nokia base station was only slightly larger, physically, than the flat-screen-base-station vision I have been talking about for many years now, and along the lines that T. Marzetta from Bell Labs had already back in 2006. Now that cellular Massive MIMO is a commercial reality… what should the research community do? Granted there are still lots of algorithmic innovation possible (and needed), but …. Cell-free massive MIMO with RF over fiber is the probably the obvious next step.
T. Marzetta from NYU gave an industry distinguished talk, speculating about the future of wireless beyond Massive MIMO. What, if anything at all, could give us another 10x or 100x gain? A key point of the talk was that we have to go back to (wave propagation) physics and electromagnetics, a message that I very much subscribe to: the “y=Hx+w” models we typically use in information and communication theory are in many situations rather oversimplified. Speculations included the use of super-directivity, antenna coupling and more… It will be interesting to see where this leads, but at any rate, it is interesting fundamental physics.
There were also lots of other (non-Massive MIMO) interesting things: UAV connectivity, sparsity… and a great deal of questions and discussion on how machine learning could be leveraged, more about that at a later point in time.
I never thought it would happen so fast. When I started to work on Massive MIMO in 2009, the general view was that fully digital, phase-coherent operation of so many antennas would be infeasible, and that power consumption of digital and analog circuitry would prohibit implementations for the foreseeable future. More seriously, reservations were voiced that reciprocity-based beamforming would not work, or that operation in mobile conditions would be impossible.
These arguments, it turned out, all proved to be wrong. In 2017, Massive MIMO was the main physical-layer technology under standardization for 5G, and it is unlikely that any serious future cellular wireless communications system would not have Massive MIMO as a main technology component.
But Massive MIMO is more than a groundbreaking technology for wireless communications: it is also an elegant and mathematically rigorous approach to teaching wireless communications. In the moderately-large number-of-antennas regime, our closed-form capacity bounds become convenient proxies for the link performance achievable with practical coding and modulation.
These expressions take into account the effects of all significant physical phenomena: small-scale and large-scale fading, intra- and inter-cell interference, channel estimation errors, pilot reuse (also known as pilot contamination) and power control. A comprehensive analytical understanding of these phenomena simply has not been possible before, as the corresponding information theory has too complicated for any practical use.
The intended audiences of Fundamentals of Massive MIMO are engineers and students. I anticipate that as graduate courses on the topic become commonplace, our extensive problem set (with solutions) available online will serve as a useful resource to instructors. While other books and monographs will likely appear down the road, focusing on trendier and more recent research, Fundamentals of Massive MIMO distills the theory and facts that will prevail for the foreseeable future. This, I hope, will become its most lasting impact.
To read the preface of Fundamentals of Massive MIMO, click here. You can also purchase the book here.
Our recent guest post about the combination of Massive MIMO and drones has received a lot of interest on social media. The use of unmanned aerial vehicles (UAVs) for wireless communications is certainly an emerging topic that deserves further attention!
While the previous blog post focused on Massive MIMO aspects of UAV communications, other theoretical research findings are reviewed in this tutorial by Walid Saad and Mehdi Bennis:
Furthermore, the team of the ERC Advanced PERFUME project, lead by Prof. David Gesbert, has recently demonstrated what appears to be the world’s first autonomous flying base station relays. This exciting achievement is demonstrated in the following video:


 -antenna base station (BS) serves
-antenna base station (BS) serves  single-antenna users. The large-scale channel gains include pathloss with exponent
single-antenna users. The large-scale channel gains include pathloss with exponent  and shadowing having log-scale standard deviation
and shadowing having log-scale standard deviation  , with the gain between the
, with the gain between the  th BS and the
th BS and the  th user served by a BS of interest denoted by
th user served by a BS of interest denoted by  .
.
 is the gain from the serving BS and
is the gain from the serving BS and  is the share of that BS’s power allocated to user
is the share of that BS’s power allocated to user  .
. , with the proportionality constant ensuring that
, with the proportionality constant ensuring that  . This makes
. This makes  . Moreover, as
. Moreover, as 
 , which makes it valid for arbitrary BS locations.
, which makes it valid for arbitrary BS locations. . Define
. Define  as the solution to
as the solution to  where
where  is the lower incomplete gamma function. For
is the lower incomplete gamma function. For  , in particular,
, in particular,  . Under a uniform power allocation, the CDF of
. Under a uniform power allocation, the CDF of  is available in an explicit form involving the Gauss hypergeometric function
is available in an explicit form involving the Gauss hypergeometric function  (available in MATLAB and Mathematica):
(available in MATLAB and Mathematica):
 ” indicates asymptotic (
” indicates asymptotic ( ) equality,
) equality,  is such that the CDF is continuous, and
is such that the CDF is continuous, and
 :
:

 with CDF
with CDF  readily characterizable from the expressions given earlier. From
readily characterizable from the expressions given earlier. From  , the sum spectral efficiency at the BS of interest can be found as
, the sum spectral efficiency at the BS of interest can be found as  Expressions for the averages
Expressions for the averages ![\bar{C} = \mathbb{E} \big[ C_k \big]](https://ma-mimo.ellintech.se/wp-content/ql-cache/quicklatex.com-a887caab28778e8d91a237bcc86a9f3e_l3.png "Rendered by QuickLaTeX.com") and
and ![\bar{C}_{\scriptscriptstyle \Sigma} = \mathbb{E} \! \left[ C_{\scriptscriptstyle \Sigma} \right]](https://ma-mimo.ellintech.se/wp-content/ql-cache/quicklatex.com-865de5351a43ee6f0405ddb531ed84ee_l3.png "Rendered by QuickLaTeX.com") are further available in the form of single integrals.
are further available in the form of single integrals.
 . For the special case of
. For the special case of 

 ,
,  and
and  –
– dB with the analysis. The behaviors with these typical outdoor values of
dB with the analysis. The behaviors with these typical outdoor values of 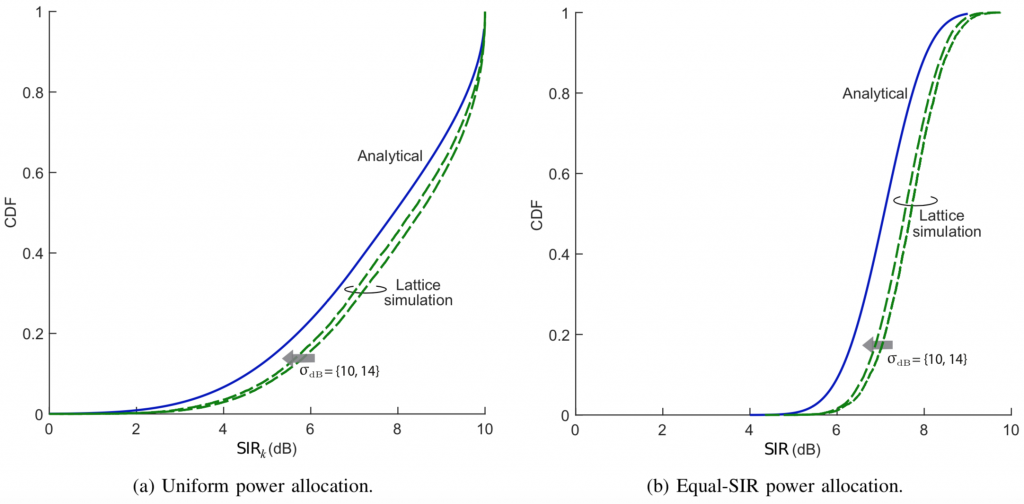
 and
and  . Figs. 2a-2b compare the simulations for
. Figs. 2a-2b compare the simulations for  dB with the analysis, and the agreement is now complete. The simulated average spectral efficiency with a uniform power allocation is
dB with the analysis, and the agreement is now complete. The simulated average spectral efficiency with a uniform power allocation is  b/s/Hz/user while (2) gives
b/s/Hz/user while (2) gives  b/s/Hz/user.
b/s/Hz/user.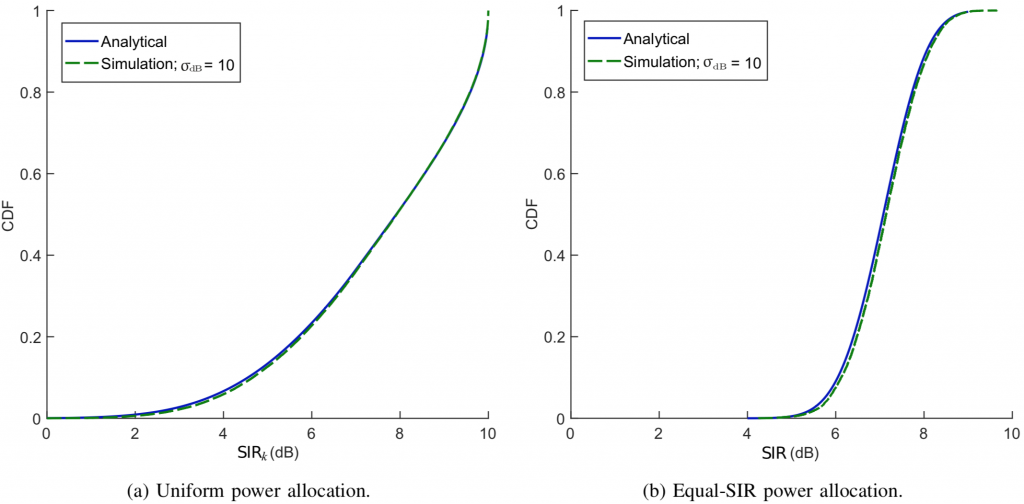
 –
– with very conservative premises) where these effects are rather minor, and the analysis is hence applicable.
with very conservative premises) where these effects are rather minor, and the analysis is hence applicable.