I this video clip I talk about an important lesson learned while working on Massive MIMO:
And in this video clip I talk more in general about our book, Fundamentals of Massive MIMO:

I this video clip I talk about an important lesson learned while working on Massive MIMO:
And in this video clip I talk more in general about our book, Fundamentals of Massive MIMO:
Three massive-MIMO-related highlights from IEEE ICC in Kansas City, MO, USA, this week:
There were also lots of other (non-Massive MIMO) interesting things: UAV connectivity, sparsity… and a great deal of questions and discussion on how machine learning could be leveraged, more about that at a later point in time.
I never thought it would happen so fast. When I started to work on Massive MIMO in 2009, the general view was that fully digital, phase-coherent operation of so many antennas would be infeasible, and that power consumption of digital and analog circuitry would prohibit implementations for the foreseeable future. More seriously, reservations were voiced that reciprocity-based beamforming would not work, or that operation in mobile conditions would be impossible.
These arguments, it turned out, all proved to be wrong. In 2017, Massive MIMO was the main physical-layer technology under standardization for 5G, and it is unlikely that any serious future cellular wireless communications system would not have Massive MIMO as a main technology component.
But Massive MIMO is more than a groundbreaking technology for wireless communications: it is also an elegant and mathematically rigorous approach to teaching wireless communications. In the moderately-large number-of-antennas regime, our closed-form capacity bounds become convenient proxies for the link performance achievable with practical coding and modulation.
These expressions take into account the effects of all significant physical phenomena: small-scale and large-scale fading, intra- and inter-cell interference, channel estimation errors, pilot reuse (also known as pilot contamination) and power control. A comprehensive analytical understanding of these phenomena simply has not been possible before, as the corresponding information theory has too complicated for any practical use.
The intended audiences of Fundamentals of Massive MIMO are engineers and students. I anticipate that as graduate courses on the topic become commonplace, our extensive problem set (with solutions) available online will serve as a useful resource to instructors. While other books and monographs will likely appear down the road, focusing on trendier and more recent research, Fundamentals of Massive MIMO distills the theory and facts that will prevail for the foreseeable future. This, I hope, will become its most lasting impact.
To read the preface of Fundamentals of Massive MIMO, click here. You can also purchase the book here.

Our recent guest post about the combination of Massive MIMO and drones has received a lot of interest on social media. The use of unmanned aerial vehicles (UAVs) for wireless communications is certainly an emerging topic that deserves further attention!
While the previous blog post focused on Massive MIMO aspects of UAV communications, other theoretical research findings are reviewed in this tutorial by Walid Saad and Mehdi Bennis:
You can also check out this tutorial by Rui Zhang.
Furthermore, the team of the ERC Advanced PERFUME project, lead by Prof. David Gesbert, has recently demonstrated what appears to be the world’s first autonomous flying base station relays. This exciting achievement is demonstrated in the following video:
Recently, there has been a hype on the use of drones (also called unmanned aerial vehicles (UAVs)) for civilian and military applications. Especially, in the coming decades, lightweight miniature drones are expected to play a major role in the society. Nowadays, small drones are available in toy shops so that an individual could buy it for personal uses such as aerial videography. However, due to security reasons, the personal use of drones is limited to low altitudes (up to 120 m in most countries) and visible line-of-sight. On the other hand, it is most likely that, in many countries, government agencies and commercial firms will be allowed to use drones for a variety of services (See: link 1 and link 2.)
There are many foreseen applications that involve a large number of drones in a limited area such as disaster management, traffic monitoring, crowd management, and crop monitoring. The major communication requirements of most of the drone networks are: several tens of Mbps throughput for streaming high-resolution video, low latency for command and control, highly reliable connectivity in a three-dimensional coverage area, high-mobility support, and simultaneous support for a large number of drones.
The existing wireless systems are unsuitable for communicating with a large number of drones in long-range, high throughput, and high-altitude applications for the following reasons:
For the above-mentioned reasons, instead of borrowing from existing wireless technologies, it would be better to develop a new technology, considering the specific drone networks’ requirements and propagation characteristics. As of now, spectrum allocation and standardization efforts for drone communication networks are in the initial stage of development. This is where Massive MIMO can play a key role. The attractive features of Massive MIMO, such as spatial multiplexing and range extension, can be exploited to design flexible and efficient drone communication systems. 5G is based on the concept of network slicing, where the network can be configured differently depending on the use case. Therefore, it is possible to deploy a variation of 5G for drone communications along with appropriately tilted antenna arrays to provide connectivity to the drones flying at high altitudes.
In our recent papers (1 and 2), we illustrated the use for Massive MIMO for drone communications. From these papers, we make the following observations:
Below are some examples of use cases of Massive MIMO enabled drone communication systems. The technical details of Massive MIMO based system design can be found in this paper. The Massive MIMO design parameters for some of the use cases can be found in this paper.
Drone racing: In recent years, drone racing, also called “the sport of the future”, is becoming popular around the world. In drone racing, low latency is important for drone control, because even a few tens of milliseconds delay might crash the drone when it moves at the speed of 40-50 m/s. Interestingly, in our digital world, analog transmission is used for sending videos from racing drones to the pilots. The reason is that, unlike digital transmission, an analog transmission does not incur any processing delay and the overall latency is about only 15 ms. Currently, the 5.8 GHz band (5650 MHz to 5925 MHz) is used for drone racing. The transmitter and receiver use frequency modulation and it requires 40 MHz frequency separation to avoid cross-talks between neighboring channels. As a result, the number of simultaneous drones in a contest is limited to eight. The video quality is also poor. By using Massive MIMO, several tens of drones can simultaneously participate in a contest and the pilots can enjoy latency-free high-quality video transmission.
Sports streaming: Utilizing drones for sports streaming will change the way we view the sports events. High resolution 4K 360-degree videos taken by multiple drones at different angles can be broadcasted to enable the viewers to have an entirely a new experience. If there are 20 drones covering a sports event, the required sum throughput will be in the order of 10 Gbps. Massive MIMO in the mm-wave frequency band can be used to achieve this high throughput. This can become reality as already there are signs towards the use of drones for covering sports events. For instance, during the 2018 Winter Olympics, drones will be extensively used.
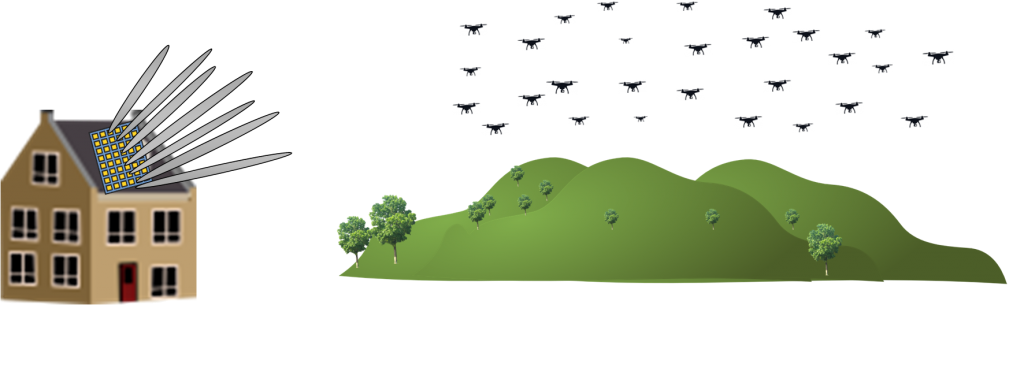
Surveillance/ Search and Rescue/Disaster management: During natural disasters, a network of drones can be quickly deployed to enable the rescue teams to assess the situation in real-time via high-resolution video streaming. Depending on the area to be covered and desired video quality, the sum throughput requirement will be in the order of Gbps. A Massive MIMO array deployed over a ground vehicle or a large aerial vehicle can be used for serving a swarm of drones.
Aerial survey: A swarm of drones can be used for high-resolution aerial imagery of several kilometers of landscape. There are many uses of aerial survey, including state governance, city planning, 3D cartography, and crop monitoring. Massive MIMO can be an enabler for such high throughput and long-range applications.
Backhaul for flying base stations: During emergency situations and heavy traffic conditions, UAVs could be used as flying base stations to provide wireless connectivity to the cellular users. A Massive MIMO base station can act as a high-capacity backhaul to a large number of flying base stations.
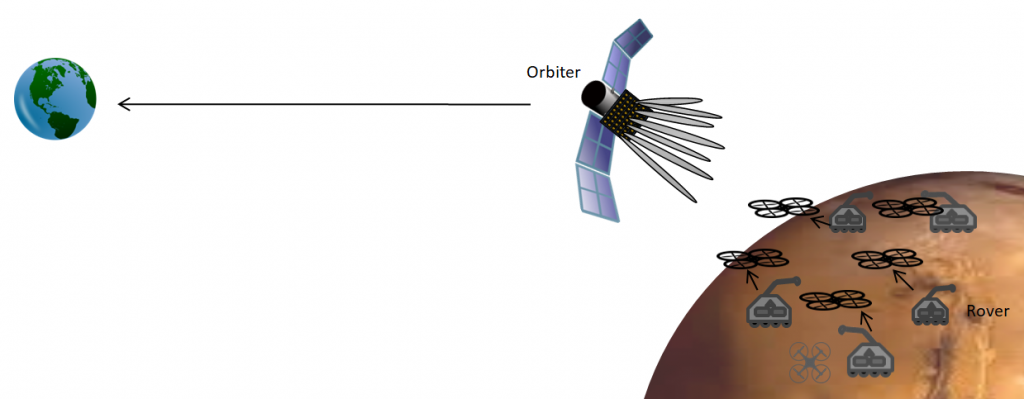
Space exploration: Currently, it takes several hours to receive a photo taken by the Curiosity Mars rover. It is possible to use Massive MIMO to reduce the overall transmission delay. For example, by using a massive antenna array deployed in an orbiter (see the above figure), a swarm of drones and rovers roaming on the surface of another planet can send videos and images to earth. The array can be used to spatially multiplex the uplink transmission from the drones (and possibly the rovers) to the orbiter. Note that the distance between the Mars surface and the orbiter is about 400 km. If the drones fly at an altitude of a few hundred meters and spread out over the region with a few hundred kilometers of radius, the angular resolution of the array is sufficient for spatial multiplexing. The array can be used to transmit the collected images and videos to earth by exploiting the array gain. This might sound like a science fiction, but NASA is already developing a 256 element antenna array for future Mars rovers to enable direct communication with the earth.

I attended GLOBECOM in Singapore earlier this week. Since more and more preprints are posted online before conferences, one of the unique features of conferences is to meet other researchers and attend the invited talks and interactive panel discussions. This year I attended the panel “Massive MIMO – Challenges on the Path to Deployment”, which was organized by Ian Wong (National Instruments). The panelists were Amitava Ghosh (Nokia), Erik G. Larsson (Linköping University), Ali Yazdan (Facebook), Raghu Rao (Xilinx), and Shugong Xu (Shanghai University).
No common definition
The first discussion item was the definition of Massive MIMO. While everyone agreed that the main characteristic is that the number of controllable antenna elements is much larger than the number of spatially multiplexed users, the panelists put forward different additional requirements. The industry prefers to call everything with at least 32 antennas for Massive MIMO, irrespective of whether the beamforming is constructed from codebook-based feedback, grid-of-beams, or by exploiting uplink pilots and TDD reciprocity. This demonstrates that Massive MIMO is becoming a marketing term, rather than a well-defined technology. In contrast, academic researchers often have more restrictive definitions; Larsson suggested to specifically include the TDD reciprocity approach in the definition. This is because it is the robust and overhead-efficient way to acquire channel state information (CSI), particularly for non-line-of-sight users; see Myth 3 in our magazine paper. This narrow definition clearly rules out FDD operation, as pointed out by a member of the audience. Personally, I think that any multi-user MIMO implementation that provides performance similar to the TDD-reciprocity-based approach deserves the Massive MIMO branding, but we should not let marketing people use the name for any implementation just because it has many antennas.

Important use cases
The primary use cases for Massive MIMO in sub-6 GHz bands are to improve coverage and spectral efficiency, according to the panel. Great improvements in spectral efficiency have been demonstrated by prototyping, but the panelist agreed that these should be seen as upper bounds. We should not expect to see more than 4x improvements over LTE in the first deployments, according to Ghosh. Larger gains are expected in later releases, but there will continue to be a substantial gap between the average spectral efficiency observed in real cellular networks and the peak spectral efficiency demonstrated by prototypes. Since Massive MIMO achieves its main spectral efficiency gains by multiplexing of users, we might not need a full-blown Massive MIMO implementation today, when there are only one or two simultaneously active users in most cells. However, the networks need to evolve over time as the number of active users per cell grows.
In mmWave bands, the panel agreed that Massive MIMO is mainly for extending coverage. The first large-scale deployments of Massive MIMO will likely aim at delivering fixed wireless broadband access and this must be done in the mmWave bands; there is too little bandwidth in sub-6 GHz bands to deliver data rates that can compete with wired DSL technology.
Initial cost considerations
The deployment cost is a key factor that will limit the first generations of Massive MIMO networks. Despite all the theoretic research that has demonstrated that each antenna branch can be built using low-resolution hardware, when there are many antennas, one should not forget the higher out-of-band radiation that it can lead to. We need to comply with the spectral emission masks – spectrum is incredibly expensive so a licensee cannot accept interference from adjacent bands. For this reason, several panelists from the industry expressed the view that we need to use similar hardware components in Massive MIMO as in contemporary base stations and, therefore, the hardware cost grows linearly with the number of antennas. On the other hand, Larsson pointed out that the futuristic devices that you could see in James Bond movies 10 years ago can now be bought for $100 in any electronic store; hence, when the technology evolves and the economy of scale kicks in, the cost per antenna should not be more than in a smartphone.
A related debate is the one between analog and digital beamforming. Several panelists said that analog and hybrid approaches will be used to cut cost in the first deployments. To rely on analog technology is somewhat weird in an age when everything is becoming digital, but Yazdan pointed out that it is only a temporary solution. The long-term vision is to do fully digital beamforming, even in mmWave bands.
Another implementation challenge that was discussed is the acquisition of CSI for mobile users. This is often brought up as a showstopper since hybrid beamforming methods have such difficulties – it is like looking at a running person in a binocular and trying to follow the movement. This is a challenging issue for any radio technology, but if you rely on uplink pilots for CSI acquisition, it will not be harder than in a system of today. This has also been demonstrated by measurements.
Open problems
The panel was asked to describe the most important open problems in the Massive MIMO area, from a deployment perspective. One obvious issue, which we called the “grand question” in a previous paper, is to provide better support for Massive MIMO in FDD.
The control plane and MAC layer deserve more attention, according to Larsson. Basic functionalities such as ACK/NACK feedback is often ignored by academia, but incredibly important in practice.
The design of “cell-free” densely distributed Massive MIMO systems also deserve further attention. Connecting all existing antennas together to perform joint transmission seems to be the ultimate approach to wireless networks. Although there is no practical implementation yet, Yazdan stressed that deploying such networks might actually be more practical than it seems, given the growing interest in C-RAN technology.
10 years from now
I asked the panel what will be the status of Massive MIMO in 10 years from now. Rao predicted that we will have Massive MIMO everywhere, just as all access point supports small-scale MIMO today. Yazdan believed that the different radio technology (e.g., WiFi, LTE, NR) will converge into one interconnected system, which also allows operators to share hardware. Larsson thinks that over the next decade many more people will have understood the fundamental benefits of utilizing TDD and channel reciprocity, which will have a profound impact on the regulations and spectrum allocation.
I am borrowing the title from a column written by my advisor two decades ago, in the array signal processing gold rush era.
Asymptotic analysis is a popular tool within statistical signal processing (infinite SNR or number of samples), information theory (infinitely long blocks) and more recently, [massive] MIMO wireless communications (infinitely many antennas).
Some caution is strongly advisable with respect to the latter. In fact, there are compelling reasons to avoid asymptotics in the number of antennas altogether:
Finally, and perhaps most importantly, careless use of asymptotic arguments may yield erroneous conclusions. For example in the effective SINRs in multi-cell Massive MIMO, the coherent interference scales with M (number of antennas) – which yields the commonly held misconception that coherent interference is the main impairment caused by pilot contamination. But in fact, in many relevant circumstances it is not (see case studies here): the main impairment for “reasonable” values of M is the reduction in coherent beamforming gain due to reduced estimation quality, which in turn is independent of M.
In addition, the number of antennas beyond which the far-field assumption is violated is actually smaller than what one might first think (problem 3.14).
